Roller Grasper V2
Abstract
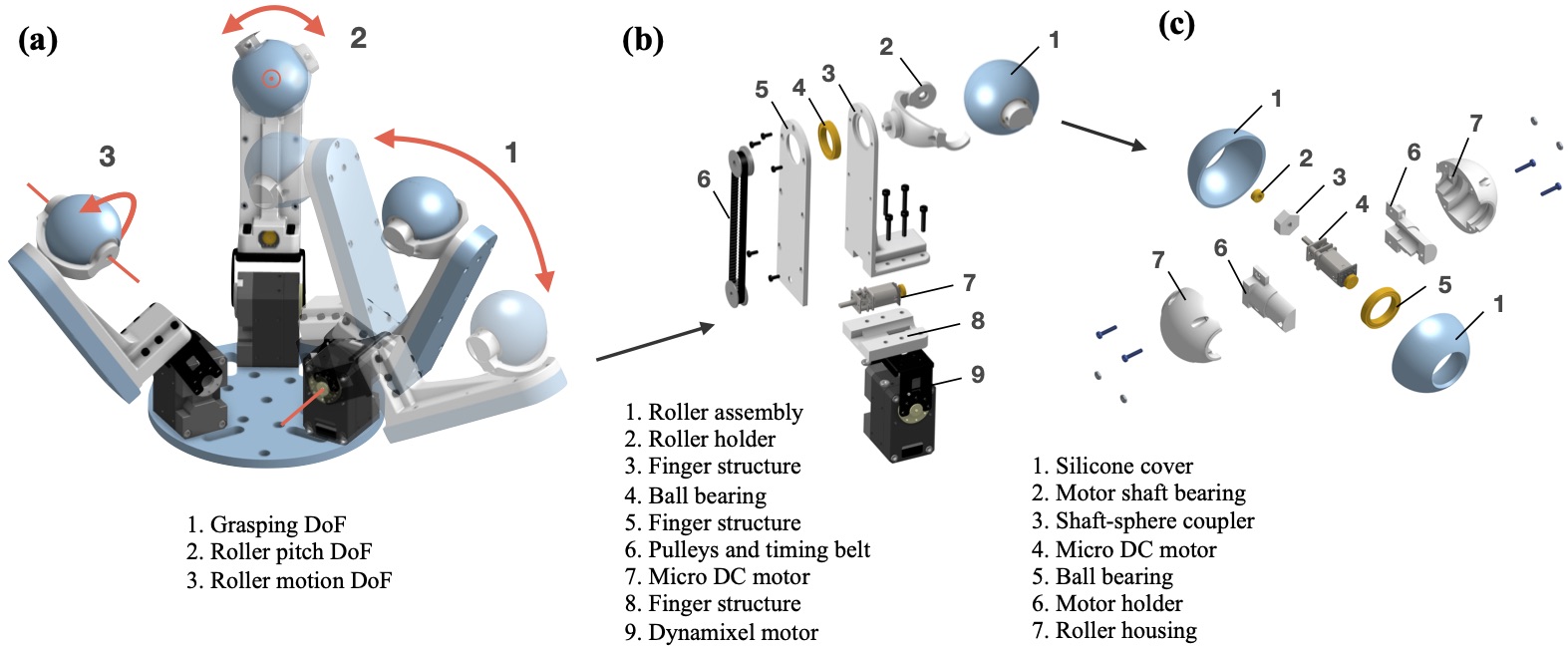
The ability to perform in-hand manipulation still remains an unsolved problem; having this capability would allow robots to perform sophisticated tasks requiring repositioning and reorienting of grasped objects. In this work, we present a novel non-anthropomorphic robot grasper with the ability to manipulate objects by means of active surfaces at the fingertips. Active surfaces are achieved by spherical rolling finger tips with two degrees of freedom (DoF) – a pivoting motion for surface reorientation – and a continuous rolling motion for moving the object. A further DoF is in the base of each finger, allowing the fingers to grasp objects over a range of size and shapes. Instantaneous kinematics was derived and objects were successfully manipulated both with a custom hard- coded control scheme as well as one learned through imitation learning, in simulation and experimentally on the hardware.
Design
System Architecture
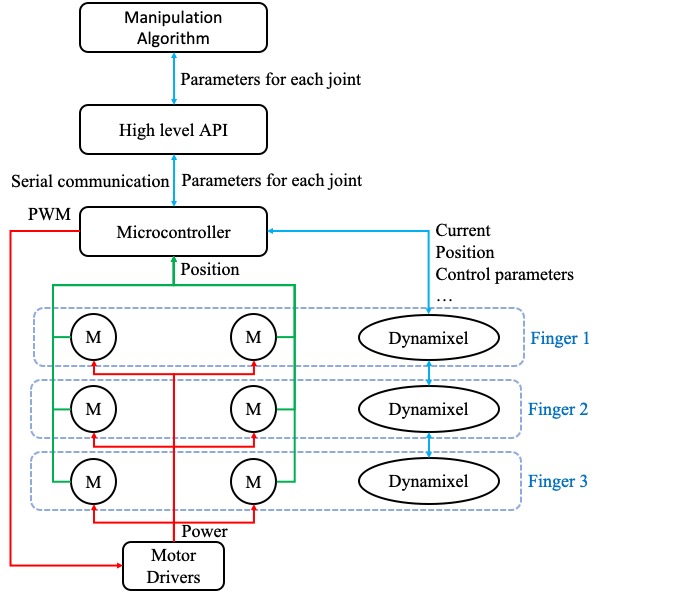
The system architecture used to operate the gripper is shown in the Figure to the left. A custom API (click here for code) was developed to interface the low-level (hardware) information to the manipulation algorithm or user input. Information transferred during the bidirectional communication includes positions for each joint of the fingers, the current limit of the base joint, as well as the control parameters for controlling the motors. Current to the Dynamixel motors is used to set the stiffness of the base joints and measure force exerted by the object on each finger during manipulation.
A Teensy 3.6 microcontroller is used to handle communication with the high-level API as well as low-level control of the motors. The six micro gearmotors located at the intermediate joints and within the rollers are controlled by PD position controllers handled by the microcontroller. The Dynamixel motors each run local PD control and communicate with the Teensy microcontroller through a TTL half-duplex asynchronous serial communication protocol.Imitation Learning
Handcrafted Expert Policy
- Given the object’s initial and target positions and orientations all nine joint angles for the gripper could be calculated.
- his naïve policy generated strictly linear trajectories and involved no path planning.
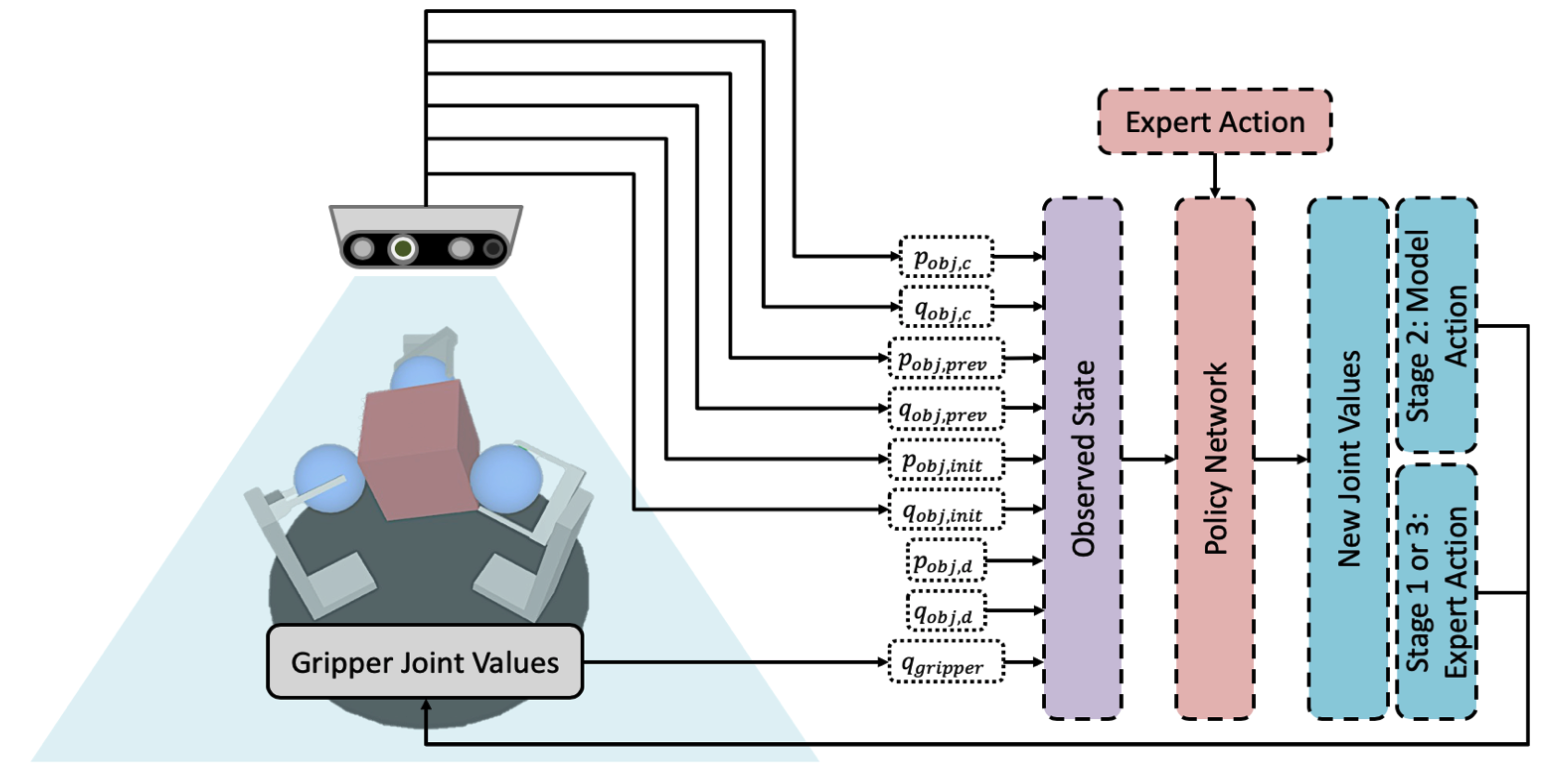
Learned Policy
- Input: The system state, which was described as the current, previous, initial, and target object position and orientation, and all nine gripper joint positions.
- Output: Nine joint positions for the gripper.
- Network: Three hidden layers with 256 nodes each and ReLU activations
Publications
Yuan, S., Lin, S., Yako, C., Gruebele, A. & Salisbury, K. (2019). Design and Control of Roller Grasper V2 for In-Hand Manipulation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2020.