Tactile-Reactive Roller Grasper
Abstract
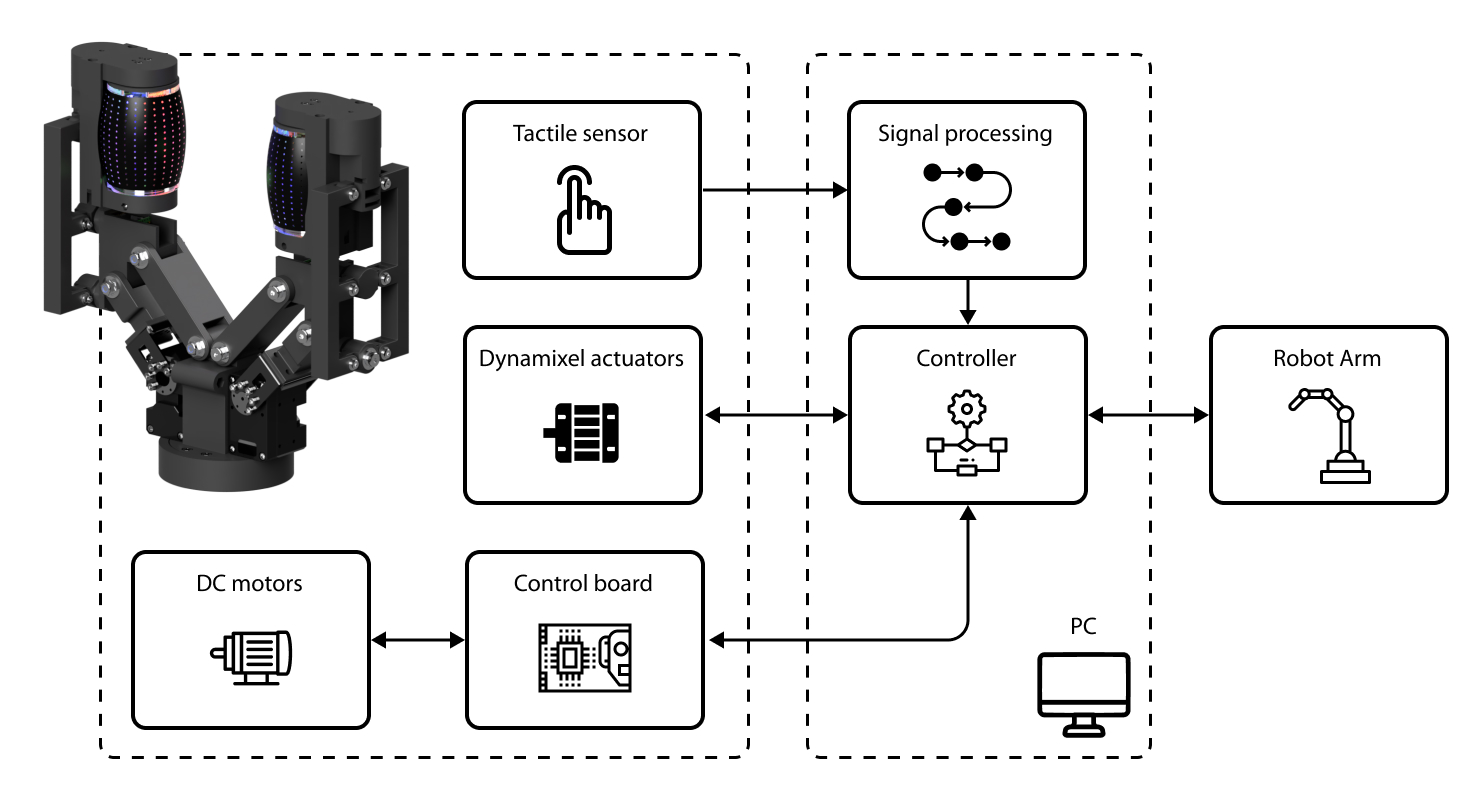
Manipulation of objects within a robot's hand is one of the most important challenges in achieving robot dexterity. The "Roller Graspers" refers to a family of non-anthropomorphic hands utilizing motorized, rolling fingertips to achieve in-hand manipulation. These graspers manipulate grasped objects by commanding the rollers to exert forces that propel the object in the desired motion directions. In this paper, we explore the possibility of robot in-hand manipulation through tactile-guided rolling. We do so by developing the Tactile-Reactive Roller Grasper (TRRG), which incorporates camera-based tactile sensing with compliant, steerable cylindrical fingertips, with accompanying sensor information processing and control strategies. We demonstrated that the combination of tactile feedback and the actively rolling surfaces enables a variety of robust in-hand manipulation applications. In addition, we also demonstrated object reconstruction techniques using tactile-guided rolling. A controlled experiment was conducted to provide insights on the benefits of tactile-reactive rollers for manipulation. We considered two manipulation cases: when the fingers are manipulating purely through rolling and when they are periodically breaking and reestablishing contact as in regrasping. We found that tactile-guided rolling can improve the manipulation robustness by allowing the grasper to perform necessary fine grip adjustments in both manipulation cases, indicating that hybrid rolling fingertip and finger-gaiting designs may be a promising research direction.
Design
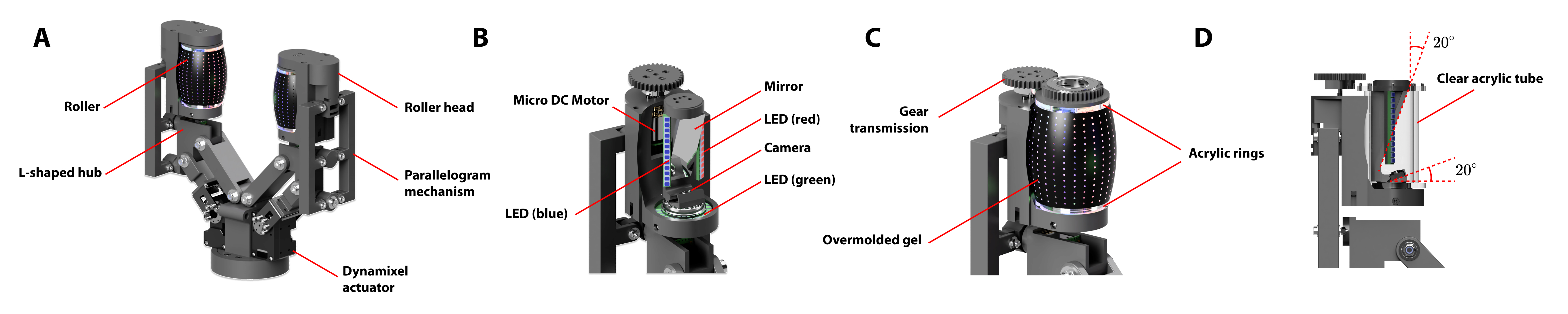
System Architecture
Publications
Yuan, S., Wang, S., Patel, R., Tippur, M., Yako, C. L., Cutkosky, M. R., Adelson, E., & Salisbury, K. (2025). Tactile-Reactive Roller Grasper. IEEE Transactions on Robotics, 1–18.
Chaoyi Pan, Marion Lepert, Yuan, S., Rika Antonova, Jeannette Bohg (2023). In-Hand Manipulation of Unknown Objects with Tactile Sensing for Insertion. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023.