Roller Grasper
Abstract
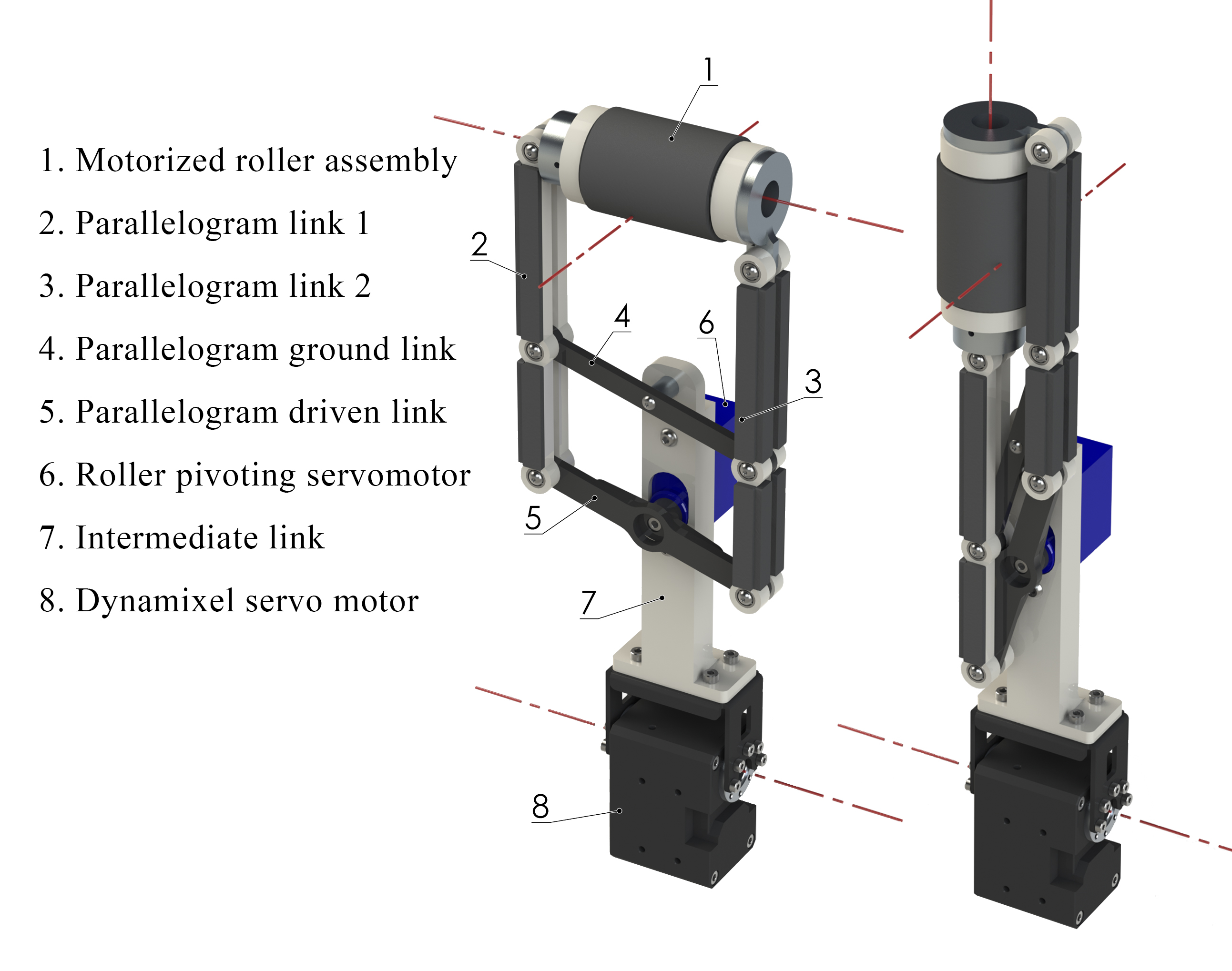
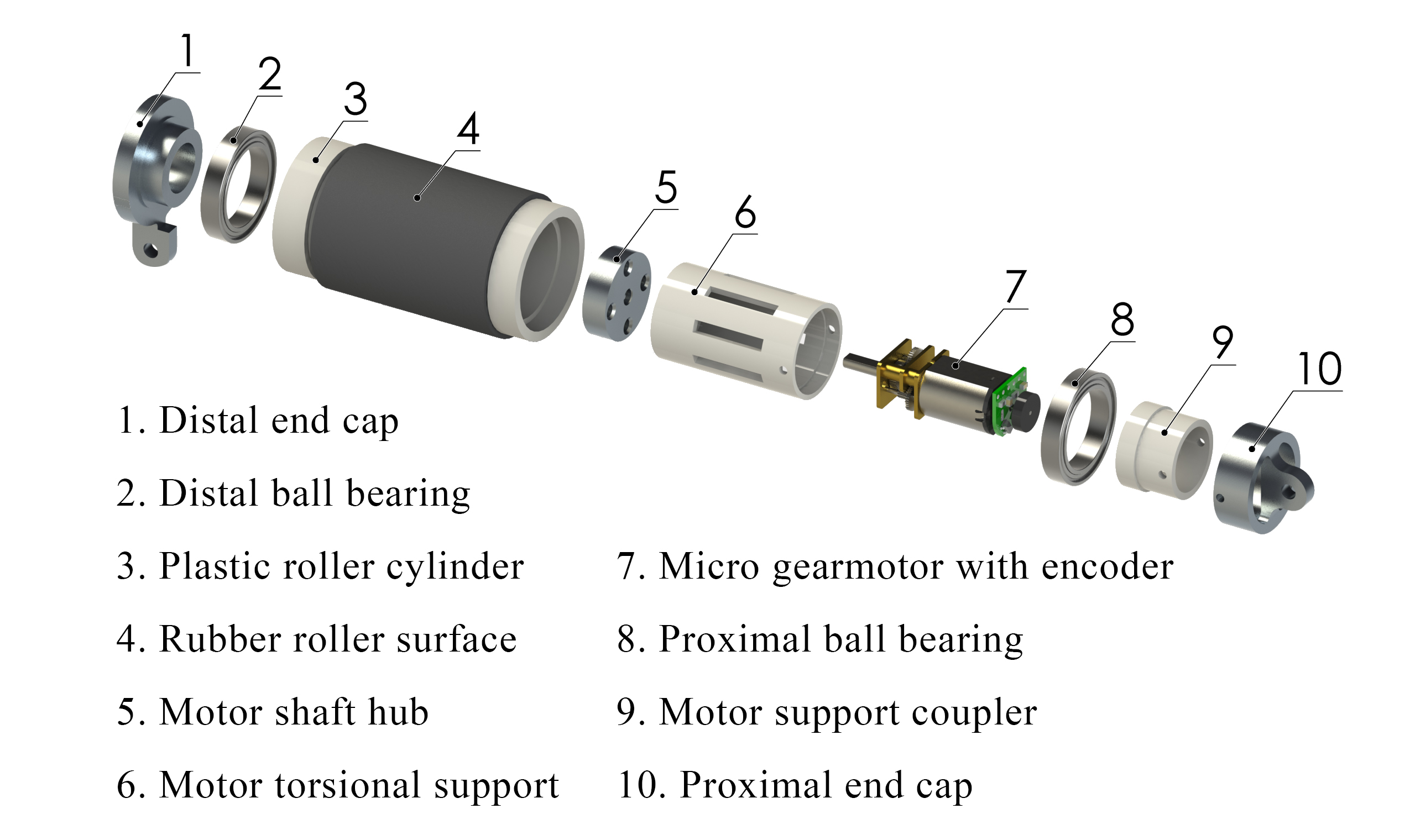
This work shows the development of a novel non-anthropomorphic robot hand with the ability to manipulate objects by means of articulated, actively driven rollers located at the fingertips. An analysis is conducted and systems of equations for two-finger and three-finger manipulation of a sphere are formulated to demonstrate full six degree of freedom nonholonomic spatial motion capability. A prototype version of the hand was constructed and used to grasp and manipulate a variety of objects. Tests conducted with the prototype confirmed the validity of the mathematical analysis. Unlike conventional approaches to within-hand manipulation using legacy robotic hands, the continuous rotation capability of our rolling finger- tips allows for unbounded rotation of a grasped object without the need for finger gaiting.
Design
Publications
Yuan, S., Epps, A., Nowak, J., & Salisbury, K. (2020). Design of a Roller-Based Dexterous Hand for Object Grasping and Within-Hand Manipulation. International Conference on Robotics and Automation (ICRA) 2020.
Winner, Best Student Paper Award
Winner, Best Paper Award in Robot Manipulation
Finalist, Best Paper Award
Finalist, Best Paper Award in Mechanisms and Design