Belt–Augmented Compliant Hand
Abstract
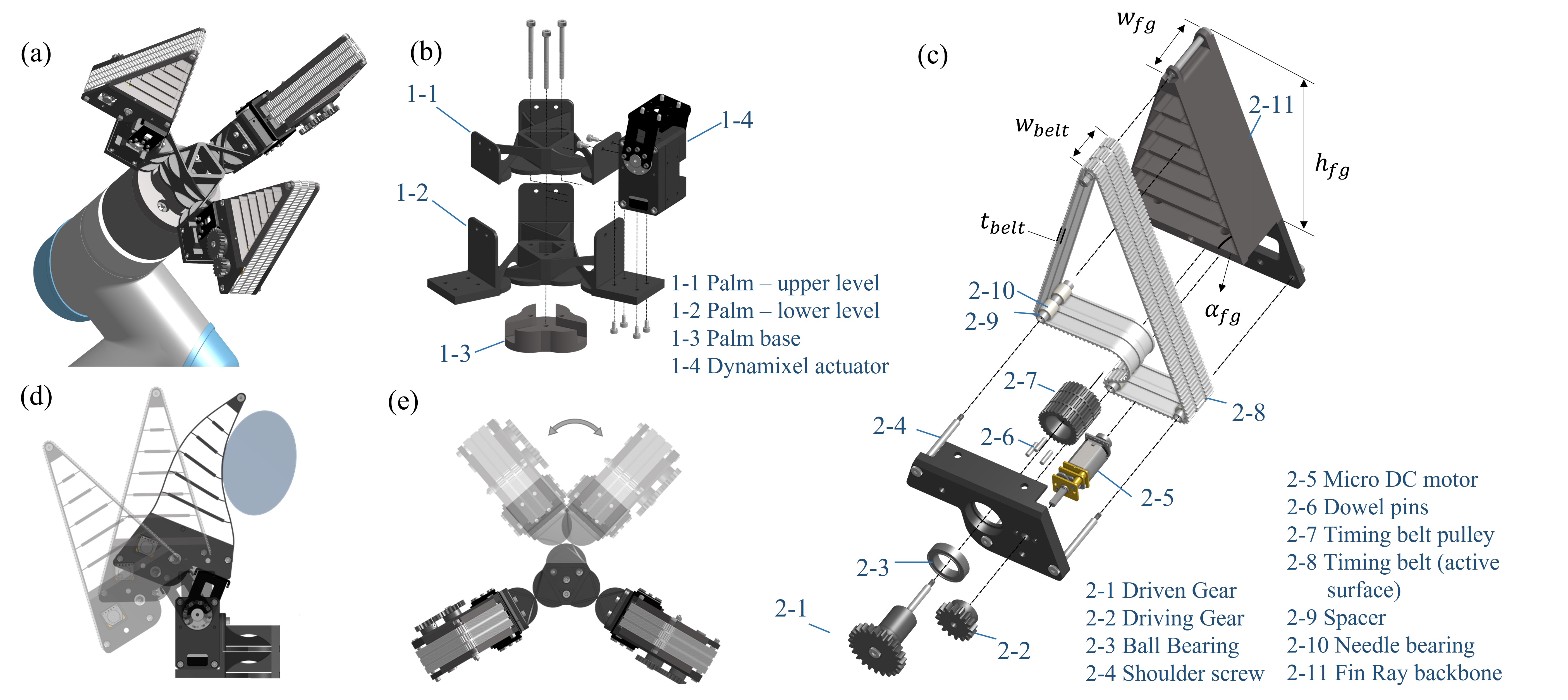
This paper describes the development of BACH (Belt–Augmented Compliant Hand), a compliant robotic hand equipped with active surfaces. The hand can securely grasp an object using power grasp and simultaneously manipulate the grasped object. The hand consists of three identical fingers, each with an actuated timing belt wrapped around a Fin Ray based compliant finger backbone. Each finger is mounted on a compliant pivot joint allowing for further adaptability. The combination of compliant mechanisms and active surfaces allows the hand to perform dexterous in-hand manipulation with great robustness. Multiple analyses were conducted to optimize and validate the design of BACH. The hand was experimentally tested for grasping and manipulating objects of various geometries and sizes, and it demonstrated highly robust and efficient robust in-hand manipulation capabilities.
Design
Publications
Cai, Y., Yuan, S. (2023). In-Hand Manipulation in Power Grasp: Design of an Adaptive Robot Hand with Active Surfaces. IEEE International Conference on Robotics and Automation (ICRA) 2023.
Winner, Outstanding Manipulation Paper Award
Finalist, Outstanding Conference Paper Award